

前言#
在上一期中我们着重介绍了 RT-DETR 这一模型,并且解释了什么是 DETR 的问题。今天我们继续来看 DETR 的变种模型——RF-DETR。
RF-DETR于2025年11月发表于论文《RF-DETR: Neural Architecture Search for Real-Time Detection Transformers》,由Roboflow公司和CMU联合提出,被 ICLR 2026所收录,据官方口径,RF-DETR基于 DINOv2 视觉 Transformer 骨干网络,在 COCO 和 RF100-VL 上实现了最先进的精度-延迟权衡。是截至目前(2026.5),实时检测领域的 SOTA 方法。
按照惯例,我们今天仍然将介绍了 RF-DETR 的backbone、neck、Encoder/Decoder以及 RF-DETR 的独创之处——NAS(神经架构搜索)。不了解 DETR 的读者请见上一篇博客《详解RT-DETR》。另外由于DINOv2自监督模型的特殊性,本博客还会涉及到一些强化学习和自监督学习的基础知识。
详解 RF-DETR#
背景与定位#
模型名字中的“RF”就是Roboflow的缩写,是Roboflow公司开发的实时目标检测模型。其设计目的主要是解决开放词表检测器(YOLO-World)和专用检测器(YOLO26、RT-DETR)精度和推理速度之间的矛盾。
网络结构#
Backbone:DINOv2——自监督预训练ViT#
DINO的名字来源于 Self-DIstillation with NO labels,其核心思路是“不用label,用蒸馏来预训练”。 DINOv2 是 Meta AI 2023 年发布的自监督 Vision Transformer 模型(结构几乎与 ViT 一致),从 1.42 亿张无标签图像里学到了一套泛用性和鲁棒性都很强的视觉特征,大部分下游任务不微调也能直接用。
论文《DINOv2: Learning Robust Visual Features without Supervision》
为什么要自监督?
在讲 DINOv2 怎么训练之前,我们先想想:为什么 RF-DETR 不像 RT-DETR 那样选用一个在 ImageNet 上有监督预训练的 ResNet/HGNetv2,而要选一个“没人告诉它图里是什么”的模型?
有监督预训练有一个绕不开的问题——标签会限制模型看到的世界。在 ImageNet 上做 1000 类分类,模型最终学到的特征会高度偏向“可分类”这件事,对类别相关的纹理、轮廓非常敏感,但对“类别外”的几何关系、空间结构、细粒度部位的差异往往一笔带过。检测任务恰恰需要后者:模型既要分清楚是什么,更要知道在哪儿、长什么样、和周围怎么挨着的。
而自监督训练的训练思路完全不同,它不告诉模型“这是猫”,而是让模型去学习两个问题:同一张图被裁剪、抖动、模糊后,你还认不认得它是同一个东西?图里某一块被遮住了,你能不能根据上下文把它脑补出来? 当一个模型能稳定地回答这两个问题,它必然学到了一组语义+几何+上下文都很扎实的通用特征。这正是检测器最想要的 backbone。
自蒸馏的核心思想
DINO/DINOv2 的训练范式叫做自蒸馏(Self-Distillation)。蒸馏这个词大家应该不陌生,传统的知识蒸馏需要一个已经训好的大模型当老师,让小学生模仿老师的输出。但 DINO 这里玩了个花招:老师和学生是同一个模型,只不过老师的参数是学生参数的“滑动平均”版本。
我们准备两个结构完全一样的网络,记作 Student $f_{\theta_s}$ 和 Teacher $f_{\theta_t}$。Student 走标准反向传播更新参数;Teacher 不接收梯度,它的参数 $\theta_t$ 由 Student 参数 $\theta_s$ 的指数移动平均(EMA) 得到:
$$\theta_t \leftarrow \lambda \cdot \theta_t + (1 - \lambda) \cdot \theta_s$$其中 $\lambda$ 是接近 1 的常数(DINOv2 中通常从 0.994 余弦上升到 1.0)。这样做的好处很直观:Teacher 始终是 Student 的滑动平均版本,输出更平滑,给 Student 提供了一个比自己当前状态更靠谱的拟合目标。学生对着老师学习,损失不断下降。

Multi-crop:同一张图,两种视角
有了师生结构,下一个问题是:给 Student 和 Teacher 看什么?学什么?
DINOv2 采用了一种叫 Multi-crop 的输入策略。对同一张图,随机生成两类视图:
- Global crops:2 个大视角,分辨率 $224 \times 224$,覆盖图像 50% 以上的区域,保留了完整的语义结构。
- Local crops:若干个小视角(默认 8 个),分辨率 $96 \times 96$,只覆盖图像 5%–50% 的局部区域,可能只是一只眼睛、一片叶子。
关键规则:所有视图(大+小)都喂给 Student,但只有 global crops 喂给 Teacher。换句话说,Teacher 看到的是“一棵完整的树”,Student 看到的是“一片叶子”,然后我们让 Student 回答:你这片叶子的特征,和 Teacher 看到的整棵树,是不是一致的?
这一不对称设计强迫模型学到局部—全局一致性(local-to-global correspondence)——也就是无论我看到的是整体还是局部,我应该都能映射到同一个语义。这种性质对检测尤其重要,因为检测器面对的是图中各种尺度、各种位置的局部目标,建立起局部全局的一致性能大大降低误检漏检的几率。
两个训练目标:DINO Loss + iBOT Loss
DINOv2 在 DINOv1 的基础上,把两条自监督路线合并了起来:一条管图像级语义(DINO loss),一条管 patch 级细节(iBOT loss)。
1. 图像级目标——DINO Loss
对每一个视图,网络末端接一个投影头(projection head),输出一个 $K$ 维的向量(默认 $K = 65536$),再过 softmax 得到一个概率分布。我们把 Student 在视图 $x$ 上的输出记作 $P_s(x)$,Teacher 在视图 $x'$ 上的输出记作 $P_t(x')$,则 DINO loss 是两者之间的交叉熵:
其中 $\mathcal{V}_g$ 是 global crops 集合,$\mathcal{V}$ 是所有视图集合。直观理解就是:Teacher 给一个 global view 输出一个软分布,Student 看到的任何其他视图(无论大小)都要预测出同样的软分布。
这里有一个非常关键的工程细节,叫做centering + sharpening,用来防止训练坍缩(collapse),输出一个常数分布或者全部塌缩到某一维。
- Centering:对 Teacher 的输出做一个滑动平均的减项,把分布从“被某一维主导”往“均匀分布”拉。
- Sharpening:对 Teacher 输出的 softmax 用一个非常低的温度($\tau_t \approx 0.04$–$0.07$,正常是 $1$),让分布变尖锐,避免被 centering 拉成完全均匀。
两者一拉一推,使 Teacher 的输出始终保持在“既有区分性又不过度集中”的状态,训练得以稳定进行。
2. Patch 级目标——iBOT Loss
DINO loss 只关心整张图的 [CLS] token 分类表示,对 ViT 输出的众多 patch token 没有直接监督。DINOv2 引入 iBOT 的思路来补上这一块:
具体做法是 Masked Image Modeling(MIM),类似 BERT 的“完形填空”。把 Student 输入图像中的部分 patch 随机 mask 掉,让 Student 仅根据可见的 patch 去预测被遮住位置的特征;而 Teacher 看到的是未被 mask 的完整图像,它对应位置的 patch 输出就作为软标签。
记被 mask 的 patch 位置集合为 $\mathcal{M}$,则 iBOT loss 写作:
$$\mathcal{L}_{\text{iBOT}} = -\sum_{i \in \mathcal{M}}\ P_t^{(i)}(x)\cdot \log P_s^{(i)}(\tilde{x})$$其中 $\tilde{x}$ 是被 mask 后的图像,$P^{(i)}$ 表示第 $i$ 个 patch 位置的输出分布。这样一来,模型不仅要在整体语义上对齐,每一个 patch 自己也得对得上,这迫使 backbone 学到位置敏感、细粒度的视觉表征——正好是检测器需要在 patch 网格上做密集预测的能力。
最终的总损失就是两者加权求和:
$$\mathcal{L}_{\text{total}} = \mathcal{L}_{\text{DINO}} + \mathcal{L}_{\text{iBOT}}$$数据:LVD-142M 的“筛子”
有了好的损失函数还不够,自监督最看重的另一件事是数据。DINOv2 团队没有简单地把网上爬来的图片一股脑塞进去,而是构建了一个叫 LVD-142M 的精选数据集。
它的构建逻辑大致是:从一个约 25 亿张图片的原始池子出发,先用一组 curated 数据集(如 ImageNet-22k、Google Landmarks 等)作为“种子”,然后用一个预训练 ViT 提取所有图片的特征,对原始池子里的图片做最近邻检索 + 去重 + 类别均衡聚类,最后筛出 1.42 亿张分布均匀、质量较高、与种子语义接近的图片。
这一过程很像“用筛子从泥沙里挑金子”,结果是:相比直接用未筛选的网络爬虫数据,LVD-142M 训练出来的 DINOv2 在下游任务上的表现明显更好,且完全不依赖任何人工标注。
伪影问题与 Register Tokens
把视角从训练机制拉回到 backbone 的输出本身——直接拿 DINOv2 出来一用,你会发现一个非常诡异的现象:在最后一层的 patch token 里,某些位置的特征向量范数(norm)异常巨大,比正常 patch 高出十倍甚至上百倍,可视化在 attention map 上就是几块刺眼的“亮斑”,被称为 ViT 的伪影(artifacts)。
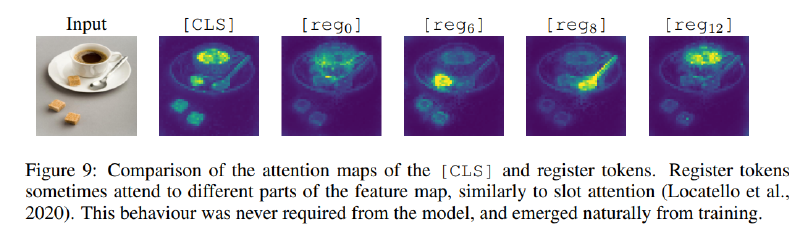
更怪的是,这些 high-norm 的异常 token 几乎全部出现在图像中信息量最低的背景区域——比如一面纯色墙、一片天空、一块桌面。本该最“无聊”的地方反而获得了最强的激活。
Meta AI 在 2023 年的论文《Vision Transformers Need Registers》中对此给出了一个非常反直觉的解释:模型在训练过程中,自发地把这些它认为没用的背景 token 征用成了自己的“草稿纸”——用来存储一些全局性的、与具体位置无关的信息(比如全局上下文摘要、给 CLS 辅助使用的中间量等)。这是 ViT 在没有显式 scratchpad 机制下被迫做出的“自适应涌现”。
这个行为对分类任务影响不大(CLS token 该怎样还怎样),但对密集预测任务(检测、分割、深度估计)就是灾难:因为 patch token 是直接被下游用作位置特征的,而这些位置的特征已经被模型挪作他用,相当于交付给检测头的地图里,被偷偷塞进了几块不属于地图本身的便签纸。RF-DETR 这种以每个 patch 为基本单元做预测的检测器,恰恰是受此影响最严重的一类。
怎么修? 答案出奇地简单——既然模型需要 scratchpad,那就显式地给它几张草稿纸。具体做法是:在 patch token 序列之外,再额外拼接 $N$ 个可学习的 Register Tokens(DINOv2 with Registers 默认 $N=4$):
$$\text{Tokens} = [\,\text{CLS};\ \text{REG}_1,\ \ldots,\ \text{REG}_N;\ \text{patch}_1,\ \ldots,\ \text{patch}_{HW}\,]$$这些 register tokens 和 patch tokens 一样参与所有的 Self-Attention 计算,也接收梯度更新,但在输出端被完全丢弃——既不参与下游的分类,也不送给检测头做密集预测。它们用完即弃,唯一的职责就是充当模型“想存什么就往里塞”的中转站。
效果非常直接:
- patch token 上的 high-norm 伪影几乎完全消失,attention map 重新变得干净;
- 模型的“草稿”信息被引流到了 register tokens 上,patch token 重新专注于自己位置的语义;
- 在检测、分割等密集预测任务上,下游精度有显著且稳定的提升。
这也是为什么 RF-DETR 默认采用带 Registers 版本的 DINOv2,并在 NAS 搜索空间里专门留了一条“是否启用 register tokens”的开关——它确实是一个会显著影响下游精度、却几乎不增加延迟的关键设计。
为什么 RF-DETR 选 DINOv2
回过头来看 RF-DETR 的选择,就一目了然了:
- 强通用特征:DINOv2 backbone 在分类、分割、深度估计、检测等任务上几乎无需微调即可达到接近 SOTA 的性能,迁移到检测任务的“起点”非常高。
- patch 级表征丰富:iBOT 路线让每个 patch 的 token 都有清晰的语义和定位信息,正好契合 DETR 风格检测器以 patch 序列为 Encoder/Decoder 输入的范式。
- 训练成本边际效益高:检测数据集(COCO、RF100-VL)规模有限,从一个见过 1.42 亿张图的 backbone 开始 fine-tune,比从 ImageNet 的 1.28M 起步要划算得多。
至于 DINOv2 如何被 RF-DETR 进一步剪裁、改造以满足实时性约束,我们将在 NAS 一节中详细展开。
Neck:Projector#
这是RF-DETR的关键设计,用于将ViT单尺度($40\times40\times768$)的输出魔改为多尺度特征,同时兼顾实时推理的轻量化。

从示意图的原理上看,Projector 远比FPN、PAnet等传统跨尺度融合模式要简单得多。只是对同一张图做了三种分辨率变换,能够这样操作的原因是DINOv2每一层都已经有了全局感受野,天然混合有细节和语义,并不需要FPN那样的跨层信息传递。
Encoder:窗口注意力 + 全局注意力交替#

窗口注意力:在我前几期博客中的Swin Transformer讲解中有详细讲解,这里简单的带过。
把特征图切成 $W\times W$的小窗口(用NAS搜索出来,一般为两个窗口),每个token只和窗口内的token做 Self-Attention。
全局注意力层:完整的全局注意力计算,让跨窗口的远距离token建立联系,弥补窗口注意力的盲区。
两者在Encoder中交替叠加,局部感知能力和全局语义能力兼得,同时可以减少使用纯全局注意力的计算量,更好地进行实时推理。
Decoder:标准结构 + 可剪枝层#
看到这一节标题先别紧张——RF-DETR 的 Decoder 其实和上一篇博客《详解 RT-DETR》中的 Decoder 几乎完全一致,这里我们把基础部分快速过一遍,重点讲 RF-DETR 在这块多出来的一处独到设计:Decoder Layer Pruning(解码器层级剪枝)。
与 RT-DETR 一致的部分
- Query 来源:依旧是 IoU-aware Query Selection——从 Encoder 输出的全部特征里,按 “分类分数 × IoU 预测” 综合排序,挑出 Top-K(默认 300)个作为 object queries 的内容初始值,对应空间坐标作为初始参考框。
- Decoder Layer 结构:标准三件套——Self-Attention(query 之间互相算特征)、Cross-Attention(query 去看 Encoder 输出的多尺度特征)、FFN(非线性增强)。
- 训练匹配:每次前向用匈牙利算法做一对一匹配,正样本算分类+L1+GIoU,负样本只算分类(背景类)。
- 彻底摆脱 NMS:一对一匹配让每个 query 学会"我只负责一个目标"的 concept,Decoder 里的 Self-Attention 又让 query 之间互相回避——推理时直接取置信度最高的若干预测即可。
这些点上一期已经从头到尾讲透了,不再赘述。不熟悉的读者请回头翻一下 RT-DETR 那一章的损失函数小节。
RF-DETR 的新东西:Decoder Layer Pruning
RT-DETR 的 Decoder 固定 6 层,训练时每一层都接独立的预测头 + 独立的匈牙利匹配 + 独立的损失,但推理时只用最后一层的输出,前 5 层的预测头被全部丢弃。这是经典 DETR 的辅助损失(auxiliary loss)做法——它让中间层也能拿到直接的梯度监督,加速收敛、稳定训练,但中间层的预测头在部署时纯属"训练阶段的脚手架"。
RF-DETR 在这一基础上多走了一步,既然每一层都被监督过、都能独立输出一组合法的检测结果,那为什么推理时一定要走完所有层?
答案就是 Decoder Layer Pruning:推理时可以在任意一层提前"出口",丢掉后续所有层。
设训练时 Decoder 总共有 $L$ 层,每一层 $l$ 都有自己的预测头 $\text{Head}_l$ 与对应损失 $\mathcal{L}^{(l)}$,总损失:
$$\mathcal{L}_{\text{decoder}} = \sum_{l=1}^{L} \mathcal{L}^{(l)}$$部署时则只走前 $l^\star$ 层($l^\star \leq L$),用 $\text{Head}_{l^\star}$ 的输出做最终预测,后续 $L - l^\star$ 层连同它们的预测头一起直接砍掉:
$$\text{Output} = \text{Head}_{l^\star}(\,z^{(l^\star)}\,)$$这相当于训练时"养着一棵 6 层的树",部署时"想截到哪一节就截到哪一节"。在 NAS 搜索阶段,$l^\star$ 也是一个可搜的维度——延迟预算紧的部署场景(Nano、Small)会自动选较小的 $l^\star$,精度优先的场景(Large)则保留满层。
为什么这招能 work?
关键在于辅助损失把每一层都训练成了独立可用的预测器。如果没有辅助损失,中间层的输出根本不是"完整的检测结果",砍掉后面就会引发混乱。而 RF-DETR 在训练时让每一层都走完整套匈牙利匹配和损失计算,等于把 $L$ 个不同精度档位的 Decoder 同时塞进了一份权重里。
这背后其实是和 NAS 那一节同源的思想——一次训练,多档输出。Backbone 那边用 weight-sharing supernet 实现"训一次切多种尺寸",Decoder 这边用辅助损失 + layer pruning 实现"训一次切多种深度",两者拼到一起,就成了 RF-DETR 灵活到几乎离谱的部署能力。
NAS:让模型自动搜索最优配置#
聊到这里,RF-DETR 的“肉身”已经搭得差不多了:DINOv2 当 backbone、Projector 把单尺度拆成多尺度、Encoder 里窗口与全局注意力交替……但你有没有发现一件事——这些模块里到处都是“调参点”:backbone 用前几层?Projector 输出几个尺度?Encoder 堆多少层?窗口开多大?输入分辨率多少?这些问题在我们上面介绍的时候完全没有提及,因为这并不是由训练人决定的,而是用过模型内在的自动优化机制。
任何一个数字往上下挪一点,精度和延迟都会跟着变。手动一个个试,是 RT-DETR 时代的做法(人工实验搞出来 -R18/-R34/-R50/-L/-X 一堆变体),但这一套放到 2026 年实在过于原始。RF-DETR 的回答是:把这件事交给搜索算法——也就是 NAS(Neural Architecture Search,神经架构搜索)。
NAS 的“三件套”
要理解 RF-DETR 做了什么,得先知道一个标准 NAS 系统通常长什么样。它由三个部分组成:
- 搜索空间(Search Space):定义“候选架构长什么样”。比如某层的通道数能从 $\{64, 128, 256\}$ 中选、深度能在 $[6, 12]$ 之间取。
- 搜索策略(Search Strategy):从这个庞大的空间里挑出有希望的架构。早期的 NAS(如 Zoph & Le 2017 的 NASNet)用强化学习——把架构选择当作一个序列决策问题,让一个 RNN 控制器以策略梯度(REINFORCE)的方式逐 token 输出架构描述,把验证集精度当作 reward 回传给控制器更新策略。后续也出现了进化算法、贝叶斯优化、可微分 NAS(DARTS)等多种路线。
- 性能评估(Performance Estimation):给每个候选架构一个分数。最朴素的做法是把它从头训完,但那样代价是天文数字(NASNet 用了 800 块 GPU 跑了一个月)。
RF-DETR 走的是一条“一次训练,到处采样”的路子,不再像经典 RL-NAS 那样每个架构独立训练,但思路里仍然保留了“search 空间 + 搜索器 + 评估”这三件套的骨架。
RF-DETR 的核心思路:Weight-sharing Supernet
为什么经典 NAS 那么慢?原因很简单——每评估一个架构,都要把它从零训一遍。假设搜索空间里有 $10^5$ 个候选架构,每个都得训大量时间,这么多候选架构不可能训的完。
RF-DETR 借鉴了 权重共享超网(Weight-sharing Supernet) 的思想(源自 BigNAS、Once-for-All 等工作):
- 设计一个最大版本的网络(Supernet),它包含搜索空间里所有候选结构的“并集”。比如 Encoder 最深可以是 12 层,那 Supernet 就有 12 层;Backbone 最宽 hidden_dim 是 768,那 Supernet 也就把它做到 768。
- 训练 Supernet 时,每一步随机采样一个子网络(subnet) 来做前向和反向传播;不同 subnet 之间共享对应位置的参数。
- 训练完成后,Supernet 就成了一个“万能仓库”——从里面任意切出一个 subnet,它都已经具备较好的精度,不需要重新训练。
打个比方:你不再是为每件衣服单独织一匹布,而是先织一大块预留了所有剪裁线的通用布,需要哪种尺寸的衣服时,照着尺寸直接裁下来就能穿。
这一招把“训练成本”和“评估候选数”彻底解耦——训练一次,评估十万次都行。这才让真正大规模的架构搜索成为可能。
搜索空间:RF-DETR 到底在搜什么?

RF-DETR 的搜索维度横跨从输入到输出的整条链路,可以粗略分成四类:
| 模块 | 可搜的维度 | 备注 |
|---|---|---|
| 输入 | 图像分辨率(如 $448$, $512$, $576$, $640$) | 分辨率每加 64,token 数平方增长 |
| Backbone(DINOv2) | 使用的 ViT 层数(深度子集)、是否使用 register tokens、patch size | 不改 hidden_dim,避免破坏预训练权重 |
| Projector | 每个尺度的输出通道数、下采样的具体配置 | 控制 Neck 的轻重 |
| Encoder | 总层数、窗口/全局注意力的交替模式、窗口大小 $W$、FFN 扩展比等 | 决定推理延迟的大头 |
Decoder 的 query 数量、层数也在搜索范围之内,但权重影响相对较小。
backbone 不轻易改宽度这一条单独说一下。原因前面 DINOv2 一节已经讲过——hidden_dim 和投影头的预训练权重是高度耦合的,改宽度等于把 DINOv2 的 1.42 亿张图“白练了”。所以 RF-DETR 在 backbone 这一侧只敢“变浅”不敢“变窄”:用前 $k$ 层($k \in \{6, 8, 10, 12\}$)当作 backbone 即可,权重直接复用 DINOv2 的对应层。
Supernet 的训练:怎么让一块布能裁出所有衣服?
最大的难点在于:如果只随机采一个 subnet 来训,那些不被采到的“极端配置”(比如最深+最大窗口)就永远学不好。RF-DETR 采用了一种叫做 Sandwich Rule(三明治采样) 的策略(来自 BigNAS)——每一个 batch 内,同时训练以下几类 subnet:
- 最大 subnet:Supernet 本身,确保上界被充分训练。
- 最小 subnet:搜索空间里最浅最窄的那个,确保下界也练到位。
- 随机 2 个中间 subnet:覆盖搜索空间的“腰部”。
四者共享同一份输入图像,前向各自走自己的路径,损失加起来一起反向传播:
$$\mathcal{L}_{\text{supernet}} = \mathcal{L}(\text{max}) + \mathcal{L}(\text{min}) + \sum_{i=1}^{2} \mathcal{L}(\text{rand}_i)$$这个写法保证了搜索空间任何一个点都不会被遗忘——最大和最小是“天花板和地板”,中间随机覆盖中间地带。
此外还有两个工程细节:
- In-place Distillation(原地蒸馏):把最大 subnet 当作 Teacher,让较小的 subnet 在训练时不仅学 ground truth,还要学最大 subnet 的输出分布。等于把 DINOv2 学到的“自蒸馏”思想又复用了一遍——大网络给小网络当老师,让小网络的精度上限提升。
- BN 重校准:因为不同 subnet 走的路径不同,每个 subnet 的 BatchNorm 统计量也不一样。Supernet 训完后,部署任何一个 subnet 前都要用一小批数据重新跑一次 BN 统计(实际上 RF-DETR 用的是 LayerNorm,在层层之间已经完整了Normalization,不需要这一步)。
搜索阶段:延迟感知的 Pareto 寻优
Supernet 训练完成后,就到了真正的“搜索”环节。RF-DETR 关心的不只是“哪个架构精度最高”,而是 “在给定延迟预算下,哪个架构精度最高”——这是一个多目标优化问题。
形式化地写,我们要在搜索空间 $\mathcal{A}$ 中找出 Pareto 前沿:
$$\mathcal{P} = \big\{\ a \in \mathcal{A}\ \big|\ \nexists\ a' \in \mathcal{A}:\ \text{mAP}(a') \geq \text{mAP}(a)\ \wedge\ \text{Latency}(a') < \text{Latency}(a)\ \big\}$$Pareto 前沿上的每一个点都是“在这个延迟下精度无法被压榨更高”的最优配置。
RF-DETR 采用 进化算法(Evolutionary Search) 搜索 Pareto 前沿:
- 初始化:随机采样数百个 subnet,组成初代种群。
- 评估:对每个 subnet,在 Supernet 上直接取权重,在验证集上跑一次得到 mAP;在目标硬件(如 T4 GPU、Jetson Orin)上跑一次得到真实延迟。注意这里没有任何“重训练”——评估一个架构的成本从“几天”降到了“几分钟”。
- 筛选:按 Pareto 支配关系挑出当前的 Pareto 前沿,作为下一代的父代。
- 变异 / 交叉:在父代的基础上小幅修改(改一层深度、改一次窗口大小),或者把两个父代的配置拼起来产生子代。
- 迭代:重复 2–4 若干轮,前沿会逐步“外推”——同样的延迟下精度更高,或同样的精度下延迟更低。
想象你站在一片散落着大大小小石头的海滩上,每块石头是一个 subnet,石头的高度代表它的精度,石头横向的位置代表它的延迟。Pareto 前沿就是从左往右扫视时,你看到的石头顶端构成的"天际线"——只有那些没有被其他更高更左的石头挡住的,才在天际线上。
进化算法的每一次迭代,就像潮水悄悄上涨——一些原本露出的石头被淹没(被新的、更优的 subnet 支配),新的更高的石头从远处浮现(变异/交叉产生的新候选)。天际线随每一轮迭代被往上、往外推一段,但水位本身只升不降。
顺带跟强化学习版的 NAS 对比一下:两者目标相同、策略不同。RL 用一个参数化策略 $\pi_\phi$ 来输出架构序列、用 REINFORCE 优化 $\mathbb{E}_{a \sim \pi_\phi}[R(a)]$;而进化算法不维护显式策略,靠种群和选择算子隐式地“爬山”。在权重共享的设定下,每次评估代价非常低廉,进化算法的 sample-efficiency 反而更友好——这也是近几年 NAS 圈子从 RL 主流回归到进化/随机搜索的根本原因。
为何论文中提到必须在真实场景测试延迟?
NAS 论文里一个经常被忽视的坑是:FLOPs 不等于 Latency。两个 FLOPs 相同的架构,在同一块 GPU 上可能跑出 1.5 倍的延迟差,原因来自 memory bandwidth、kernel launch overhead、算子的 fusion 友好度等等。
RF-DETR 直接走最朴实但最有效的路线——在目标硬件上实测延迟。具体做法是:
- 提前枚举搜索空间里每个算子级配置的真实延迟(这一步可以离线一次性完成),构建一个 LUT(Look-Up Table)。
- 搜索时把整体延迟近似为 LUT 的加和:
- Pareto 前沿上的候选最后再过一次端到端实测校准。
这样既保证了搜索过程中评估延迟的速度(毫秒级),又保证了最终选出的架构效率在边缘上不会华而不实。
输出:一族而非一个
最终 RF-DETR 不是产出一个固定的模型,而是沿着 Pareto 前沿切出一族模型:
| 模型 | 适配延迟档位 | 典型部署 |
|---|---|---|
| RF-DETR-Nano | 最低延迟 | 移动端、Jetson Nano |
| RF-DETR-Small | 中低 | Jetson Orin、边缘服务器 |
| RF-DETR-Base | 中等 | T4 / A10 |
| RF-DETR-Medium | 中高 | A10 / A100 半负载 |
| RF-DETR-Large | 最高精度 | A100 满负载 / H100 |
这是 RF-DETR 相对 RT-DETR 最大的范式差异:RT-DETR 是“一个网络结构,配几个不同大小的 backbone”,RF-DETR 是“一次性给你一族沿 Pareto 前沿分布的架构,每个都是该延迟档位下的最优解”。换句话说,RT-DETR 给的是手工挑出的几件成衣,RF-DETR 给的是一整条裁缝流水线,照着你要的延迟尺码当场出活。
小结:NAS 给 RF-DETR 带来了什么
回到最初的问题——RF-DETR 凭什么号称“实时检测领域 SOTA”?这一节其实就是答案的核心:
- DINOv2 提供了强 backbone(特征质量天花板高)。
- Projector + 窗口/全局交替 Encoder 提供了灵活的骨架(架构有大量可调维度)。
- NAS 把这些维度自动调到了帕累托最优(在每个延迟档位上把性能压榨到极致)。
三者环环相扣:没有 1 的强 backbone,再调架构精度也上不去;没有 2 的灵活骨架,NAS 没东西可搜;没有 3 的自动搜索,2 的灵活性也只会变成调参噩梦。
如何在 Roboflow 库中简单调用 RF-DETR 模型进行微调或推理#
上一章节的 RT-DETR 我们借助的是 Ultralytics 这一“万能模型平台”,到了 RF-DETR 这边,Roboflow 自己也给出了一个非常干净的官方 Python 库——直接就叫 rfdetr。和 Ultralytics 一样,整套接口收敛到了 加载 → 推理 → 训练 → 导出 四个环节上,几乎零学习成本。
安装#
pip install rfdetr一行命令完事,模型权重下载、可视化、ONNX/TensorRT 导出工具链全部就位。如果要做 GPU 训练,确保 CUDA 版本与 PyTorch 匹配即可(这一点跟所有 PyTorch 项目都一样,不再赘述)。
可用模型#
Roboflow 官方目前主要发布了 NAS 搜出来的几个 Pareto 前沿点位,对应的类名一目了然:
| 模型类 | 参数量 | COCO mAP50-95 | 适用场景 |
|---|---|---|---|
RFDETRNano | ~14M | 48.4 | 移动端、Jetson Nano |
RFDETRSmall | ~20M | 53.0 | Jetson Orin、边缘 |
RFDETRBase | ~29M | 54.7 | T4 / A10,默认首选 |
RFDETRMedium | ~44M | 56.3 | A10 / A100 半负载 |
RFDETRLarge | ~128M | 60.5 | A100 满负载 / H100 |
不知道选哪个的话,直接从 RFDETRBase 开始——它是精度与速度的甜点位,绝大部分通用场景下都不会让你失望。
Python API:加载、推理、训练、导出#
from rfdetr import RFDETRBase
# 1. 加载预训练模型(首次运行会自动从官方下载权重)
model = RFDETRBase() # 也可换成 RFDETRNano/Small/Medium/Large
# 2. 推理:图片、视频、文件夹、URL、PIL.Image、numpy.ndarray 都支持
detections = model.predict('your_image.jpg', threshold=0.5)
# detections 是一个 supervision 库的 Detections 对象,
# 包含 xyxy 坐标、置信度、类别 id,可以直接用 supervision 做可视化
import supervision as sv
image = sv.cv2_to_pillow(sv.cv2.imread('your_image.jpg'))
annotated = sv.BoxAnnotator().annotate(image.copy(), detections)
annotated.save('output.jpg')
# 3. 训练:换上自己的数据集(COCO 格式)
model.train(
dataset_dir='path/to/your_dataset',
epochs=100,
batch_size=32,
grad_accum_steps=1,
lr=1e-4,
output_dir='runs/my_rfdetr',
)
# 4. 导出(部署阶段必用)
model.export(format='onnx') # 也支持 'tensorrt'、'coreml'数据集格式#
和 Ultralytics 用 YOLO txt 格式不同,rfdetr 默认是 COCO 格式——一个根目录下三个子目录加各自的 _annotations.coco.json:
your_dataset/
├── train/
│ ├── _annotations.coco.json
│ └── *.jpg
├── valid/
│ ├── _annotations.coco.json
│ └── *.jpg
└── test/
├── _annotations.coco.json
└── *.jpg如果你的数据集本来是 YOLO 格式或 Pascal VOC 格式,最简单的做法是直接上 Roboflow 网站建个项目,把数据传上去,下载的时候选 “COCO 格式” 就行了——Roboflow 本身就是干数据集这件事起家的,转换、清洗、标注、版本管理一条龙,对自家的 rfdetr 库是无缝转接了属于。
一些训练上的小坑#
- 学习率不要照搬 YOLO 经验:RF-DETR 的 backbone 是 DINOv2 预训练 ViT,对学习率比 ResNet/HGNetv2 更敏感。官方推荐
lr=1e-4、backbone 部分再额外降一档(库内默认配置已经处理好,自己改的时候要心里有数)。 - batch size 不够就用梯度累积:DETR 系模型对 batch size 要求很高,换言之就是需要大显存显卡,笔者用的RTX4060 8GB完全没法用,用
grad_accum_steps把"一次大batch的反向传播"拆成"N 次小batch的反向传播。官方建议的batch_size=32,那么你的batch_size与grad_accum_steps相乘等于32即可。 - 小目标场景把 query 数量调大:默认 300 个 query 在密集小目标(航拍、人群)上可能不够,库里有
num_queries参数可调。 - 预训练权重很重要:和 RT-DETR 一样,DETR 系从头训成本极高,小数据集上务必从官方权重 fine-tune,别轻易尝试从零开始。
推理部署:直接 ONNX / TensorRT#
model.export(format='onnx') 出来的 ONNX 已经包含了完整的后处理(无需手动写NMS——RF-DETR 本身就不要 NMS),可以直接喂给 ONNX Runtime 或 TensorRT。Jetson 边缘设备上推荐走TensorRT路线,能直接吃满 NAS 当初为该硬件挤出来的延迟优化收益。
# CLI 也有等价命令
rfdetr export --model base --format onnx --output rfdetr-base.onnx注意:以上内容具有时效性,rfdetr 库迭代较快,参数名和默认值请以官方文档为准。
RF-DETR 实际应用中的 workflow#
讲到这里,前面分模块、分技术点讲了一大堆——DINOv2、Projector、Encoder、Decoder、NAS——但一定有读者读完后心里其实还抱有疑问:
- DINOv2 不是无标签自监督训练的吗?那我们用 COCO 这种带 GT 框的数据集微调,到底是怎么训的?
- NAS 那一套又重又复杂,我每次微调自己的数据集时,也得跑一遍 NAS 吗?
这两个问题问得都非常好,也是把 RF-DETR 真正用起来时绕不开的两个 conceptual blocker。这一节我们就把它们说清楚,顺便把整条 workflow 从 Meta 到 Roboflow 再到你的个人计算机的模式画出来。
困惑的来源:两套训练范式的"叠加"#
RF-DETR 的训练并不是"自监督"和"NAS"两件事杂糅在一起同时发生的,而是好几个独立阶段串联起来,每个阶段干自己的事,用自己的损失函数,互不打扰。用户拿到模型时,前面所有阶段都已经被前人替你跑完了,你做的只是流水线最后一步。
要把这条链路搞清楚,我们顺着时间线从最上游开始讲起。
完整五阶段流水线#
┌──────────────────────────────────────────────────────────────┐
│ 阶段 1:DINOv2 自监督预训练 │
│ 执行者:Meta AI(2023) │
│ 数据:LVD-142M(1.42 亿张无标签图像) │
│ 损失:DINO Loss + iBOT Loss(自蒸馏,无 GT) │
│ 产物:会"看图"的 ViT 主干权重 │
└──────────────────────────────────────────────────────────────┘
▼ 加载 ViT 权重(丢弃投影头/teacher)
┌──────────────────────────────────────────────────────────────┐
│ 阶段 2:NAS Supernet 训练 │
│ 执行者:Roboflow(2025) │
│ 数据:Objects365 / COCO 等大规模检测数据集 │
│ 损失:检测损失(匈牙利匹配 + 分类 + L1 + GIoU) │
│ 产物:一个"万能仓库"超网,每个 subnet 都已被训过 │
└──────────────────────────────────────────────────────────────┘
▼ 超网上跑进化算法
┌──────────────────────────────────────────────────────────────┐
│ 阶段 3:NAS 搜索(Pareto 前沿) │
│ 执行者:Roboflow │
│ 产物:5 个固定架构 → Nano / Small / Base / Medium / Large │
└──────────────────────────────────────────────────────────────┘
▼ 每个架构再做完整训练
┌──────────────────────────────────────────────────────────────┐
│ 阶段 4:5 个架构各自完整训练 │
│ 执行者:Roboflow │
│ 数据:COCO │
│ 产物:5 个 .pt 预训练权重文件(pip install 后下载的就是这个) │
└──────────────────────────────────────────────────────────────┘
▼ 发布
───────────────────────────── 分界线 ─────────────────────────
▼
┌──────────────────────────────────────────────────────────────┐
│ 阶段 5:用户微调(你做的事) │
│ 执行者:你 │
│ 数据:你自己的 COCO 格式数据集 │
│ 损失:检测损失(和阶段 4 完全相同) │
│ 学习了什么:只动权重,架构是固定的 │
└──────────────────────────────────────────────────────────────┘仔细看上面的workflow,你会发现"自监督" 只发生在阶段 1,“NAS” 只发生在阶段 2-3,到了阶段 5 你做的事情就是纯粹的有监督微调,和训练 RT-DETR、YOLO 在数学上没有任何本质差异。前两件事都是 Meta 和 Roboflow 替你做的"重活",你拿到的是已经被打磨成形的最终成品(权重文件)。
第一个问题:自监督预训练 → 有监督微调,到底怎么衔接?#
DINOv2 的自监督训练和用 COCO 微调,是两个完全分开的阶段,用两套完全不同的损失函数。
我们把镜头拉到 RF-DETR 的完整结构上看看权重的来源:
图片
│
▼
[ DINOv2 ViT Backbone ] ←── 权重从 DINOv2 预训练加载(阶段 1 的产物)
│
▼ patch tokens
[ Projector ] ←── 权重在阶段 2 的 NAS 训练中得到
│
▼ 多尺度特征
[ Encoder ] ←── 同上
│
▼
[ Decoder + Heads ] ←── 同上
│
▼
预测框 + 类别- Backbone:从 DINOv2 加载,自监督学到的特征提取能力全部体现在这里。
- 其他所有模块(Projector、Encoder、Decoder、分类/回归头):在阶段 2-4 的 NAS 检测训练中初始化并训练好——这些组件DINOv2 backbone训练时根本不存在。
到了阶段 5 你微调时,损失函数就是标准的检测损失,具体可以参考 RT-DETR 那一篇博客给过的公式:
$$\mathcal{L}_{\text{finetune}} = \sum_{j=1}^{M}\left[\mathcal{L}_{\text{cls}}(c_j, \hat{p}_{\hat\sigma(j)}) + \mathbb{1}_{\{c_j \neq \varnothing\}} \cdot \mathcal{L}_{\text{box}}(b_j, \hat{b}_{\hat\sigma(j)})\right]$$完全用上了 COCO 的 GT 框和类别标签。没有任何 “DINO Loss” 或 “iBOT Loss” 的影子——那两个损失函数在阶段 1 用完就退休了。
第二个问题:NAS 也参与微调阶段吗?#
答案是不会的。NAS 在阶段 2-3 跑完后,架构就被固定下来了。当你写下:
from rfdetr import RFDETRBase
model = RFDETRBase()这一行构造函数里所有的层数、通道数、窗口大小、是否带 register tokens、Decoder 截到第几层……全是 Roboflow 在阶段 3 NAS 搜出来后固化在源码里的。你看到的 Python 类只是这些"出厂配置"的一个 “展示橱窗”。
打开 rfdetr 库的训练接口,你能配的参数只有这些:
model.train(
dataset_dir=...,
epochs=...,
batch_size=...,
lr=...,
grad_accum_steps=...,
...
)全是训练超参(hyperparameters),仅影响"权重怎么更新"。
而 NAS 影响的是架构超参(architectural hyperparameters)——影响"模型长什么样"。两类参数在概念上是完全分离的,微调只动前者,不动后者。
为什么不让用户跑 NAS?
理论上可以,但成本完全不现实:
- Supernet 训练:要在 Objects365 这种数千万张图的检测数据集上训,至少几十张 A100 跑一两周。比训整个 RF-DETR-Large 还要贵。
- 延迟测量需要目标硬件:评估 subnet 延迟时要在最终部署的硬件上实测。想为 Jetson Orin 优化你就得有 Jetson Orin,想为 A100 优化就得有 A100。
- 你的数据集太小:用户自定义数据集通常只有几千到几万张图,撑不起 NAS 那种"训超网 + 评估上万 subnet"的统计需求——NAS 搜出来的架构没有统计显著性。
所以 Roboflow 的设计哲学非常务实:NAS 这种重型计算搜索一次就好,把搜索到的不同架构开源出来供所有用户自用。
那如果 5 档都不满意呢?
有两种办法:
- 介于两档之间:比如 Base 不够快、Small 又不够准。直接用 Base 微调,部署时启用 Decoder Layer Pruning——前面 Decoder 那节讲过,推理时截到第 4 层而不是第 6 层,相当于在 Base 和 Small 之间动态滑一档。这是 RF-DETR 唯一让用户在部署时还能"切架构"的口子。
- 真要自定义架构:跳出
rfdetr高层 API,去官方 GitHub 仓库找 supernet 训练脚本。这条路是开放的,但你得准备好 Objects365 数据集 + 一个昂贵的训练服务器群——大多数情况下不值得。
99.99% 的用户都会停在选项 1,Layer Pruning 给出来的中间档位已经覆盖了绝大多数延迟需求。
实战 workflow 总结#
这条 workflow 想清楚以后,你就能理解为什么 RF-DETR 既"复杂"(论文里讲一堆 DINOv2、NAS、supernet)又"简单"(用起来 pip install 加几行代码),复杂的部分已经被meta和Roboflow帮你用庞大的计算集群计算完了,你所要做的只是在原有权重上进行传统的微调。
总结#
我们从四个角度详细拆解了 RF-DETR:DINOv2 自监督预训练给出了强 backbone 与 Register Tokens 这样的细节修复,Projector + 窗口/全局交替 Encoder给出了灵活的骨架,Decoder Layer Pruning让一份权重能跑出多档延迟,NAS 自动搜索把这些组件在 Pareto 前沿上调到了极致。四块拼起来,就是当下实时检测领域的 SOTA。
从 RF-DETR 身上也能看见现代 CV 的一个趋势:CNN 在精度上早就不占优势,连过去引以为豪的推理延迟一项,也在 RF-DETR 这样的模型面前被追平甚至反超了。这条路的上限我们似乎还远没摸到。
DETR 系列模型可能暂时就介绍到这里了,其他 DETR 变种你只要弄清楚 RT-DETR 和 RF-DETR,基本都能轻松理解。如果各位读者有什么问题,欢迎在 GitHub Discussions 中留言。