

前言#
在前面的博客中,我简单介绍了ViT这一初始模型的结构,
同时也提到了,ViT风格模型有着诸多变体,今天我将介绍由微软出品的Swin Transformer系列变体,介绍关于他的核心改进和算法原理,以及代码实现。
如果你还没有阅读上一篇博客,
建议先阅读完再来阅读本篇,本篇博客将会重点聚焦算法原理,偏基础的ViT细节将不会在这篇文章中提及。
同时,这将会是一个新的系列,我将拆分讲解更多的模型结构,从CNN到Transformer架构,从经典的VGG16到最近的DETR,敬请期待。
Swin Transformer核心算法原理#
Swin Transformer的核心改进总体上可以分成四个点:
- 窗口注意力(W-MSA)—— 解决计算复杂度问题
- Patch Merging —— Stage 之间的下采样,构建多尺度金字塔
- 移位窗口(SW-MSA)—— 解决窗口之间信息隔绝问题
- 相对位置编码 —— 替代 ViT 的绝对位置编码
接下来我将逐一介绍上述的改进。
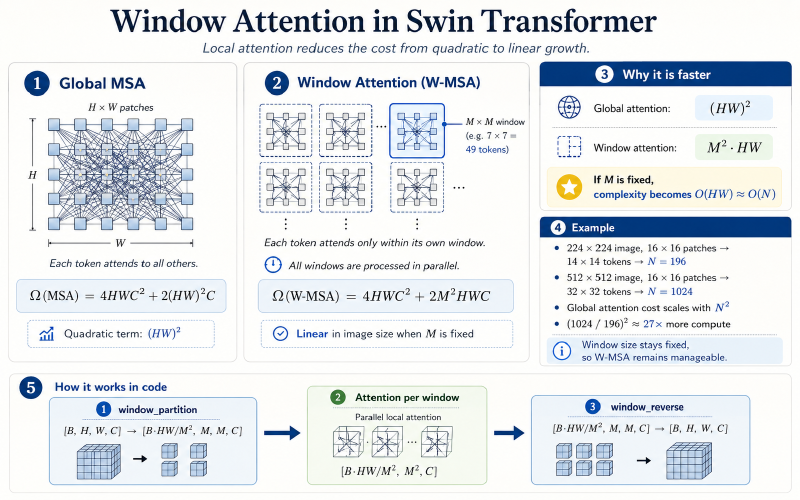
1.窗口注意力(W-MSA)#
首先让我们回顾一下ViT的核心学习机制——多头注意力机制,如果你有一定算法与数据结构基础,就能相当轻松地发现,整套算法的计算复杂度是$O(N^2)$,
N是指的Token数量。如一张224x224分辨率的图片用16x16的Patch切,N = 196,此时的复杂度还能够勉强接受。但如果要输入更高分辨率的图像以换取对小目标物体的敏感度的话,复杂度将会暴涨。比如512×512,$N$就变成 1024,复杂度暴增 27 倍,根本跑不动。
那么Swin Transformer提出的解法是怎样的呢,就是把注意力限制在固定大小的局部窗口(默认7x7=49个token)。
每个token只和同一窗口内的其他token做注意力计算,窗口之间完全并行处理。
设图像被切成 $H \times W$ 个 patch,窗口大小为 $M \times M$, 全局注意力和窗口注意力的计算复杂度对比如下:
$$\Omega(\text{MSA}) = 4HWC^2 + 2(HW)^2C$$$$\Omega(\text{W-MSA}) = 4HWC^2 + 2M^2HWC$$其中 $C$ 是每个 token 的 embedding 维度。 可以看到,全局注意力的复杂度包含 $(HW)^2$ 项,随分辨率平方增长; 而窗口注意力将这一项替换为 $M^2 \cdot HW$, 由于窗口大小 $M$ 是固定常数(默认为 7),复杂度退化为关于图像尺寸的线性复杂度 $O(N)$, 这使得 Swin 可以处理任意分辨率的输入而不会出现显存爆炸。
如果图像输入分辨率是 224×224,按照 $M=7$ 的窗口大小划分:
- 图像首先经过 Patch Embedding,用 4×4 的 patch 切分,得到 $\frac{224}{4} \times \frac{224}{4} = 56 \times 56$ 个 token
- 再按 $M=7$ 的窗口划分,共得到 $\frac{56}{7} \times \frac{56}{7} = 8 \times 8 = 64$ 个窗口
- 每个窗口内有 $7 \times 7 = 49$ 个 token,仅在窗口内部做注意力计算
复杂度对比:
$$\Omega(\text{MSA}) = 2 \times (56 \times 56)^2 \times C = 2 \times 3136^2 \times C \approx 1.97 \times 10^7 C$$$$\Omega(\text{W-MSA}) = 2 \times 7^2 \times 56 \times 56 \times C = 2 \times 49 \times 3136 \times C \approx 3.07 \times 10^5 C$$窗口注意力的计算量仅为全局注意力的 $\dfrac{49}{3136} \approx \dfrac{1}{64}$, 计算量降为原来的 1/64,代价只是把感受野从全局缩小到了单个窗口内, 而当输入分辨率继续升高时,这一比例还会进一步拉大。
在代码中,“切窗口"和"还原窗口"由两个函数完成:
def window_partition(x, window_size: int):
"""将特征图切分为一个个独立的窗口
[B, H, W, C] -> [num_windows*B, window_size, window_size, C]
"""
B, H, W, C = x.shape
x = x.view(B, H // window_size, window_size, W // window_size, window_size, C)
return x.permute(0, 1, 3, 2, 4, 5).contiguous().view(-1, window_size, window_size, C)
def window_reverse(windows, window_size: int, H: int, W: int):
"""将计算完注意力的窗口还原回完整特征图
[num_windows*B, window_size, window_size, C] -> [B, H, W, C]
"""
B = int(windows.shape[0] / (H * W / window_size / window_size))
x = windows.view(B, H // window_size, W // window_size, window_size, window_size, -1)
return x.permute(0, 1, 3, 2, 4, 5).contiguous().view(B, H, W, -1)window_partition 把形状为 $[B, H, W, C]$ 的特征图,
按照窗口大小切分成 $\frac{H}{M} \times \frac{W}{M}$ 个窗口,
每个窗口展平为 $[M^2, C]$ 的 token 序列,
所有窗口拼成一个大 batch $[\frac{HW}{M^2} \cdot B,\ M^2,\ C]$,
一次性送入注意力模块并行计算,效率极高。
计算完成后,window_reverse 再把所有窗口拼回完整的特征图。
然而,窗口注意力引入了一个新的问题:窗口之间的信息完全隔绝。 每个 token 只能看到自己窗口内的邻居,不同窗口的 token 永远无法交流, 模型的感受野被硬性限制在一个窗口内,这显然不够。 这正是 Swin Transformer 第二个核心改进——移位窗口(SW-MSA) 要解决的问题。
2. 编码器整体结构#
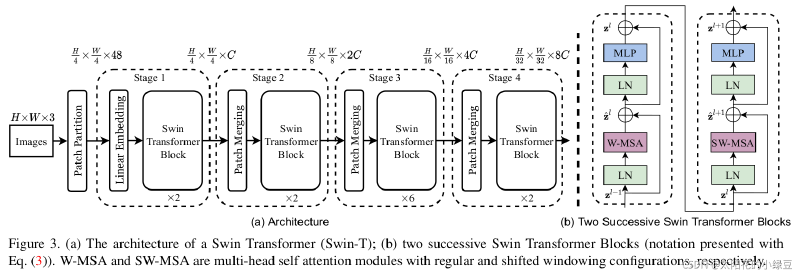
在详细讲述 Patch Merging 与 SW-MSA 之前,我们必须先弄清楚编码器的整体结构。
完成 Patch Embedding 后,Swin Transformer 的编码器由 4 个 Stage 串联而成, 每个 Stage 内部包含若干个 SwinTransformerBlock(简称 Block), 每个 Block 的结构和 ViT 的 Encoder Block 完全一致: Pre-LN → 注意力 → 残差 → Pre-LN → MLP → 残差。
以 Swin-Tiny 为例,4 个 Stage 的 Block 数量和通道数如下:
| Stage | Block 数 | 输入分辨率 | 通道数 C |
|---|---|---|---|
| Stage 1 | 2 | 56×56 | 96 |
| Stage 2 | 2 | 28×28 | 192 |
| Stage 3 | 6 | 14×14 | 384 |
| Stage 4 | 2 | 7×7 | 768 |
对应代码中的工厂函数配置:
def swin_tiny_patch4_window7_224(num_classes=1000):
return SwinTransformer(
embed_dim=96,
depths=(2, 2, 6, 2), # 4个Stage的Block数
num_heads=(3, 6, 12, 24), # 每个Stage的注意力头数
window_size=7,
)可以看到两个规律:
- 通道数每个 Stage 翻倍:$96 \to 192 \to 384 \to 768$,由
embed_dim * 2^i决定 - 分辨率每个 Stage 减半:$56 \to 28 \to 14 \to 7$,由 Stage 之间的下采样操作完成
这种"分辨率减半、通道翻倍"的层级结构,和经典 CNN(如 ResNet)的设计如出一辙, 这也是 Swin 能够直接对接 FPN 做检测和分割的根本原因——每个 Stage 的输出就是一个尺度的特征图。
3. Patch Merging——下采样与通道变化#
Stage 与 Stage 之间的分辨率减半,由 Patch Merging 完成。 它的作用类似于 CNN 中的步长为 2 的卷积或池化,负责把空间分辨率压缩、通道数扩展。
具体操作:把特征图上每个 $2 \times 2$ 的相邻 patch 组合成一组, 将这 4 个 patch 的特征向量在通道维度上拼接,再经过一个 Linear 层压缩通道。
以 Stage 3 到 Stage 4 的过渡为例,输入是 $14 \times 14$ 个 patch,每个 patch 的维度是 $C=384$:
$$\text{输入:} [B,\ 14 \times 14,\ 384] = [B,\ 196,\ 384]$$取出 $2 \times 2$ 邻域的 4 个 patch,在通道维拼接:
$$4 \times C = 4 \times 384 = 1536 \text{ 维}$$patch 数量减少为原来的 $\frac{1}{4}$:
$$14 \times 14 \to 7 \times 7 = 49 \text{ 个 patch}$$此时形状为 $[B,\ 49,\ 1536]$,再经过一个 $1536 \to 768$ 的 Linear 层压缩:
$$\text{输出:} [B,\ 49,\ 768]$$为什么通道是 $2C=768$ 而不是 $4C=1536$?
这是有意为之的设计。4 个 patch 拼接后通道变为 $4C$, 但如果直接保留 $4C$,每个 Stage 的计算量会以 4 倍速增长,很快变得不可接受。 通过 Linear 层压缩到 $2C$,在保留空间下采样的同时, 将计算量的增长控制在可接受的范围内——分辨率减半带来的计算量减少($\frac{1}{4}$) 恰好被通道翻倍的增加($\times 4$)部分抵消,净效果是每个 Stage 的总计算量大致持平。
对应代码:
class PatchMerging(nn.Module):
def __init__(self, input_resolution, dim, norm_layer=nn.LayerNorm):
super().__init__()
self.reduction = nn.Linear(4 * dim, 2 * dim, bias=False) # 4C → 2C
self.norm = norm_layer(4 * dim)
def forward(self, x, H, W):
B, L, C = x.shape
x = x.view(B, H, W, C)
# 取出2×2邻域的4个patch,在通道维拼接
x = torch.cat([
x[:, 0::2, 0::2, :], # 左上
x[:, 1::2, 0::2, :], # 左下
x[:, 0::2, 1::2, :], # 右上
x[:, 1::2, 1::2, :], # 右下
], dim=-1) # [B, H/2, W/2, 4C]
H_out, W_out = H // 2, W // 2
# LayerNorm + Linear 压缩通道:4C → 2C
return self.reduction(self.norm(x.view(B, -1, 4 * C))), H_out, W_out4. 移位窗口(SW-MSA)——打破窗口间的信息壁垒#
层与层之间的交替
在每个 Stage 内部,相邻两个 Block 交替使用两种注意力方式:
# BasicLayer 中,按奇偶为每个 Block 分配 shift_size
SwinTransformerBlock(
...,
shift_size = 0 if (i % 2 == 0) else window_size // 2
# 偶数 Block → shift_size=0 → W-MSA(普通窗口)
# 奇数 Block → shift_size=3 → SW-MSA(移位窗口)
)为什么要交替? W-MSA Block 负责窗口内部的精细交流,其输出作为下一个 Block 的输入; SW-MSA Block 把窗口整体偏移 $\lfloor M/2 \rfloor = 3$ 个 patch, 让上一层被窗口边界隔开的相邻 token 得以在同一窗口内相遇,完成跨边界的信息交流。 两个 Block 串联,局部交流与跨窗口交流各做一次,形成完整的感受野扩展。
直接移位的问题
如果直接把 $7 \times 7$ 的窗口向右下偏移 3 个 patch, 右下侧图像边缘区域会"移出"特征图,而左上方的图像则会凸出来,产生大小不一的残缺窗口,无法并行处理。 以 $14 \times 14$ 的特征图为例:
$$\text{原始窗口数:} \frac{14}{7} \times \frac{14}{7} = 4 \text{ 个完整窗口}$$移位后:出现宽度为 3、4、7 的混合窗口,沿两个维度共有 3×3 = 9 种组合,无法统一处理
Cyclic Shift:循环折叠
Swin 的解法是不真正"移动"窗口,而是对整张特征图做循环滚动——
窗口向右下方偏移 $M/2$,右下角随之出现空缺,左上角的图片会凸出窗口
torch.roll 通过循环滚动把左侧和上方的 patch 补到左上角的空缺处:
# 特征图向左上方循环滚动,等价于窗口向右下方偏移
x = torch.roll(x, shifts=(-self.shift_size, -self.shift_size), dims=(1, 2))以 $14 \times 14$、$M=7$、$\text{shift}=3$ 为例,循环滚动后:
- 原本位于左上角 $[0:3,\ 0:3]$ 区域的 patch,折叠到了右下角 $[11:14,\ 11:14]$ 的空缺处
- 特征图总 token 数不变,仍是 $14 \times 14 = 196$ 个
- 按 $7 \times 7$ 正常切分,仍得到 4 个形状统一的完整窗口,可以一次性并行处理
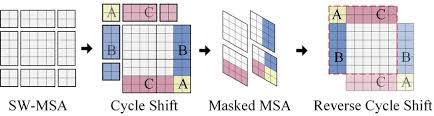
根据示意图来看,折叠后,依旧是四个形状统一的完整窗口,但显然除去左上角的窗口,其他的窗口都或多或少会有本不应该相邻的区域又拼接, 而他们之间是不应该互相计算注意力的,这就需要使用注意力掩码登场了。
Attention Mask——屏蔽不合法的 token 对
折叠后,部分窗口内同时包含了图像中本不相邻的区域,这样不相邻的区域不应该互相计算注意力,
需要增添一个掩码以消除这一问题。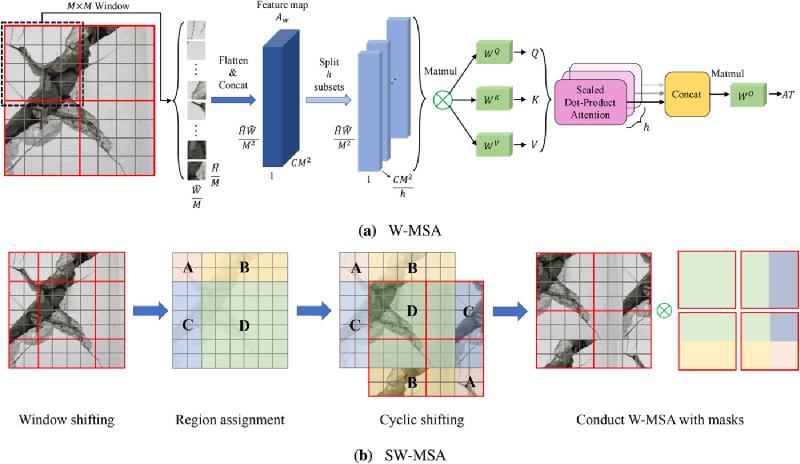
解决方案是在初始化时预先计算好一个 attn_mask,
把同一窗口内来自不同区域的 token 对的注意力分数强制置为 $-100$:
即注意力权重趋近于 0,效果等同于完全屏蔽,但不需要任何额外的分支处理。
attn_mask 的计算逻辑是:把特征图划分为 9 个区域并分别编号(0-8),
切分成窗口后,同一窗口内编号不同的 token 对就是需要屏蔽的非法对:
@staticmethod
def _compute_attn_mask(H, W, window_size, shift_size):
img_mask = torch.zeros(1, H, W, 1)
# 把特征图按滑动切片划分为9个区域,分别赋予编号 0-8
h_slices = (slice(0, -window_size),
slice(-window_size, -shift_size),
slice(-shift_size, None))
w_slices = (slice(0, -window_size),
slice(-window_size, -shift_size),
slice(-shift_size, None))
cnt = 0
for h in h_slices:
for w in w_slices:
img_mask[:, h, w, :] = cnt
cnt += 1 # 共 9 个区域,编号 0-8
# 切窗口,得到每个窗口内所有 token 的区域编号
mask_windows = window_partition(img_mask, window_size) # [nW, M, M, 1]
mask_windows = mask_windows.view(-1, window_size * window_size) # [nW, M*M]
# 同一窗口内,两个 token 编号相减不为 0 → 来自不同区域 → 置为 -100
attn_mask = mask_windows.unsqueeze(1) - mask_windows.unsqueeze(2) # [nW, M*M, M*M]
return attn_mask.masked_fill(attn_mask != 0, -100.0) \
.masked_fill(attn_mask == 0, 0.0)这个 mask 在初始化时计算一次,注册为 buffer,推理时直接复用:
# 在 forward 中加到注意力分数上
if mask is not None:
nW = mask.shape[0]
attn = attn.view(B_ // nW, nW, self.num_heads, N, N) \
+ mask.unsqueeze(1).unsqueeze(0)
attn = attn.view(-1, self.num_heads, N, N)
attn = attn.softmax(dim=-1)计算完成后,反向滚动还原特征图位置:
x = torch.roll(x, shifts=(self.shift_size, self.shift_size), dims=(1, 2))整个 SW-MSA 的完整流程:
$$\text{torch.roll}(-M/2) \to \text{window\_partition} \to \text{W-Attention + mask} \to \text{window\_reverse} \to \text{torch.roll}(+M/2)$$所有 token 在每一层都被注意力完整覆盖,没有任何遗漏, 只是被 mask 屏蔽的非法 token 对实际上不产生信息交流—— 这是在不增加任何计算量的前提下,实现跨窗口信息流动的完整方案。
5. 整体梳理#
这是 Swin Transformer 中最精华也是最难理解的部分,我们再做一次完整的数据流梳理。
Stage 的概念
一个 Stage 可以类比为 ViT 中的若干个 Encoder Block 串联, 但在 Stage 尾部额外接了一个 Patch Merging 模块负责下采样—— 分辨率减半、通道翻倍,从而构建出类似 CNN 中 FPN 的多尺度特征金字塔。 正是这个层级结构,让 Swin Transformer 能够同时感知大目标和小目标, 成为检测和分割任务的强力骨干,也是它能在 COCO 等传统视觉基准上大幅刷新记录的根本原因。
Stage 内部结构
Stage 内部的每个 Block 结构与 ViT 完全一致:Pre-LN → 注意力 → 残差 → Pre-LN → MLP → 残差
唯一的区别是注意力机制被替换为 W-MSA 和 SW-MSA 的交替组合—— 偶数编号(从0开始)的 Block 使用普通窗口注意力(W-MSA),奇数编号的 Block 使用移位窗口注意力(SW-MSA), 因此同一 Stage 内永远不会出现两个相同类型的 Block 相邻的情况。
完整数据流(以 Swin-Tiny,输入 224×224 为例)
$$[B,3,224,224] \xrightarrow{\text{Patch Embed}} [B,3136,96]$$$$\xrightarrow{\text{Stage 1: 2个Block}} [B,3136,96] \xrightarrow{\text{Patch Merging}} [B,784,192]$$$$\xrightarrow{\text{Stage 2: 2个Block}} [B,784,192] \xrightarrow{\text{Patch Merging}} [B,196,384]$$$$\xrightarrow{\text{Stage 3: 6个Block}} [B,196,384] \xrightarrow{\text{Patch Merging}} [B,49,768]$$$$\xrightarrow{\text{Stage 4: 2个Block}} [B,49,768]$$最终根据任务类型分叉:
- 分类:全局平均池化 → Linear → $[B,\ \text{num\_classes}]$
- 检测 / 分割:各 Stage 输出 reshape 为 2D 特征图,返回 p2/p3/p4/p5 四个尺度(在每个 stage 进行 patch merging 之前提取)
6. 相对位置编码#
介绍完窗口注意力和移位窗口,还有一个细节值得单独拿出来讲—— Swin Transformer 用相对位置编码替换了原始 ViT 中的绝对位置编码。
为什么要换掉绝对位置编码#
ViT 的绝对位置编码是一个形状为 $[1, N+1, C]$ 的可学习参数,通过与原始embedding相加得到包含绝对位置信息的语义向量。 而这也就意味着图像上的每一个位置是一个固定的值、固定的形状,这看上去似乎没有什么不妥,但却存在一个可能的隐患, 那就是绝对位置编码和输入分辨率强绑定。如果训练时输入是 $224 \times 224$(196 个 patch), 推理时换成 $384 \times 384$(576 个 patch),就会导致训练得到的位置编码和输入的图像信息对不上号,形状不对, 必须在pytorch中插值处理,会降低精度。
而Swin 的窗口注意力只在 $M \times M$ 的窗口内计算, 窗口大小固定为 $7 \times 7 = 49$ 个 token, 因此位置关系只需要描述窗口内两个 token 之间的相对距离, 而不需要知道它们在整张图中的绝对坐标。 这天然适合用相对位置编码来描述,同时也带来了更好的分辨率泛化能力。
相对位置编码的数学形式#
注意力分数的计算公式在原始 Transformer 的基础上加入了相对位置偏置项 $B$:
$$\text{Attention}(Q, K, V) = \text{Softmax}\left(\frac{QK^T}{\sqrt{d}} + B\right)V$$其中 $B \in \mathbb{R}^{M^2 \times M^2}$ 是一个偏置矩阵, $B_{ij}$ 表示窗口内第 $i$ 个 token 和第 $j$ 个 token 之间的相对位置偏置值, 由两个 token 的相对坐标 $(\Delta h, \Delta w)$ 查表得到。
如何构建相对位置索引#
窗口大小 $M=7$,窗口内每个 token 的坐标范围是 $[0, 6]$, 两个 token 之间的相对坐标范围是 $[-(M-1), M-1] = [-6, 6]$,共 $2M-1=13$ 个可能值。 行和列各有 13 个可能值,组合后共 $(2M-1)^2 = 169$ 种相对位置关系。
代码中预先计算好所有 token 对的相对位置索引,存为 relative_position_index:
# 生成窗口内所有 token 的坐标网格
coords_h = torch.arange(self.window_size[0]) # [0,1,2,3,4,5,6]
coords_w = torch.arange(self.window_size[1]) # [0,1,2,3,4,5,6]
coords = torch.stack(torch.meshgrid(coords_h, coords_w, indexing="ij")) # [2, 7, 7]
coords_flatten = torch.flatten(coords, 1) # [2, 49]
# 计算所有 token 对之间的相对坐标:[2, 49, 49]
relative_coords = coords_flatten[:, :, None] - coords_flatten[:, None, :]
relative_coords = relative_coords.permute(1, 2, 0).contiguous() # [49, 49, 2]
# 将相对坐标从 [-6,6] 平移到 [0,12],方便作为索引使用
relative_coords[:, :, 0] += self.window_size[0] - 1 # 行方向平移
relative_coords[:, :, 1] += self.window_size[1] - 1 # 列方向平移
# 行方向乘以 (2M-1),将二维索引展平为一维
relative_coords[:, :, 0] *= 2 * self.window_size[1] - 1
self.register_buffer("relative_position_index", relative_coords.sum(-1)) # [49, 49]以两个 token 坐标 $(2, 3)$ 和 $(5, 1)$ 为例,计算其一维索引:
$$\Delta h = 2 - 5 = -3 \xrightarrow{+6} 3$$$$\Delta w = 3 - 1 = 2 \xrightarrow{+6} 8$$$$\text{index} = 3 \times 13 + 8 = 47$$即这对 token 的相对位置偏置从 relative_position_bias_table 的第 47 行取出。
位置偏置表的查表过程#
relative_position_bias_table 是一个形状为 $[(2M-1)^2,\ \text{num\_heads}]= [169, \text{num\_heads}]$ 的可学习参数,
训练时和模型其他参数一起更新:
self.relative_position_bias_table = nn.Parameter(
torch.zeros((2 * self.window_size[0] - 1) * (2 * self.window_size[1] - 1), num_heads)
) # [169, num_heads]
nn.init.trunc_normal_(self.relative_position_bias_table, std=0.02)在前向传播中,用预计算好的 relative_position_index 查表,得到偏置矩阵 $B$,
加到注意力分数上:
# 查表:[49*49] → [49, 49, num_heads] → [num_heads, 49, 49]
rpb = self.relative_position_bias_table[self.relative_position_index.view(-1)]
rpb = rpb.view(self.window_size[0] * self.window_size[1],
self.window_size[0] * self.window_size[1], -1).permute(2, 0, 1)
# 加到注意力分数上,unsqueeze(0) 对应 batch 维度
attn = attn + rpb.unsqueeze(0) # [B*nW, num_heads, 49, 49]相对位置编码的优势#
相比绝对位置编码,相对位置编码有两个明显的优势:
泛化性更强:编码的是 token 之间的相对关系而非绝对坐标, 窗口大小固定为 $7 \times 7$,无论输入图像分辨率如何变化, 窗口内的相对位置关系始终只有 169 种,位置偏置表无需做任何修改。
每个注意力头独立学习:relative_position_bias_table 的第二维是 num_heads,
每个头拥有自己独立的位置偏置,可以学到不同的空间感知模式,
有的头可能更关注水平方向的相邻关系,有的头更关注垂直方向,
这与多头注意力"让不同头关注不同特征"的初衷不谋而合。
总结#
到这里我们基本介绍完了 Swin Transformer 的算法原理。用简单的话来概括:
Swin 的核心改动是将 ViT 中的全局多头注意力替换为 W-MSA 和 SW-MSA 交替串联的窗口注意力机制, 将注意力的计算复杂度从 $O(N^2)$ 降低到 $O(N)$,从根本上解决了 ViT 处理高分辨率图像时的计算瓶颈。
由此衍生出了独特的多 Stage 层级结构——每个 Stage 通过 Patch Merging 完成下采样, 分辨率逐级减半、通道数逐级翻倍,构建出类似 CNN 中 FPN 的多尺度特征金字塔。 这一设计让 Swin 天然适配检测、分割等需要多尺度感知的视觉任务, 而这恰恰是原始 ViT 的短板所在,可谓一举两得。
此外,Swin 还做了两处细节改进: 用相对位置编码替换了 ViT 的绝对位置编码,使模型对不同输入分辨率的泛化能力更强, 每个注意力头也能独立学习不同的空间感知模式; 引入了 DropPath 随机深度正则化,随机跳过整个残差分支而非单个神经元, 训练稳定性和模型的泛化能力都得到了进一步提升。
这些改进共同造就了 Swin Transformer 在 COCO 等视觉基准上的统治级表现, 也使它成为了此后众多视觉大模型的标准骨干选择。
常见问题 Q&A#
Q:Swin-Tiny、Swin-Small、Swin-Base 三个变体的核心区别是什么?
A:主要差异在两个地方——embed_dim 和 depths:
| 变体 | embed_dim | depths | 参数量 |
|---|---|---|---|
| Swin-Tiny | 96 | (2,2,6,2) | ~28M |
| Swin-Small | 96 | (2,2,18,2) | ~50M |
| Swin-Base | 128 | (2,2,18,2) | ~88M |
Tiny 和 Small 的通道数相同,区别只在 Stage 3 的深度(6 vs 18); Base 在此基础上把基础通道数从 96 提升到 128,四个 Stage 的通道数变为 128/256/512/1024, 整体参数量和计算量都有显著提升,适合对精度要求更高的场景。
Q:Swin 处理不同分辨率的输入时会有问题吗?
A:基本没有问题,代码对此做了专门处理。
当输入分辨率不能被窗口大小整除时,SwinTransformerBlock 的 forward 会自动 padding:
pad_b = (ws - H % ws) % ws
pad_r = (ws - W % ws) % ws
if pad_b > 0 or pad_r > 0:
x = F.pad(x, (0, 0, 0, pad_r, 0, pad_b))计算完注意力后再裁剪掉补的部分,对结果没有影响。 相对位置编码只描述窗口内的相对关系,也不依赖输入分辨率, 所以 Swin 在处理任意分辨率输入时比 ViT 更加灵活。
Q:Swin 既然已经有了层级结构,为什么还需要 FPN,直接用四个 Stage 的输出不行吗?
A:直接用四个 Stage 的输出做多尺度检测是可以的,这叫做简单特征金字塔(Simple FPN)。 但标准 FPN 的价值在于自顶向下的特征融合—— 用高层的语义信息增强低层的细节信息,让 p2 这样的浅层特征图也具备足够的语义判断能力。 Swin 的各 Stage 输出之间没有跨尺度的信息流动, 接上 FPN 后浅层特征图的检测精度,尤其是对小目标的检测,会有明显提升。
Q:DropPath 是什么,和 Dropout 有什么区别?
A:DropPath 又叫随机深度(Stochastic Depth),是专门为残差网络设计的正则化手段。
Dropout 随机置零单个神经元,DropPath 随机跳过整个残差分支——
被 drop 的 Block 直接输出输入本身(恒等映射),相当于这一层"不存在”。
在 Swin 代码中,越深的 Block 被赋予越高的 drop 概率(由 drop_path_rate 线性分配),
训练时模型学会了在不同深度下工作,推理时所有 Block 都参与计算,
这既起到了正则化的效果,又隐式地让模型具备了一定的深度自适应能力。